陳巖松浴栽,馮志華,張健康
(蘇州大學(xué)機(jī)電工程學(xué)院轿偎,江蘇蘇州 215000)
摘 要:使用 SolidWorks 三維設(shè)計(jì)軟件建立了某旋轉(zhuǎn)式吹瓶機(jī)機(jī)架的三維模型典鸡,并將其導(dǎo)入到ANSYS Workbench中進(jìn)行拓?fù)鋬?yōu)化和多目標(biāo)優(yōu)化。拓?fù)鋬?yōu)化后的機(jī)架模型相比初始模型坏晦,質(zhì)量下降了8.1%萝玷,其靜動(dòng)態(tài)特性雖有小幅度下降,但仍處于安全范圍內(nèi)昆婿。在拓?fù)鋬?yōu)化的基礎(chǔ)上又對(duì)機(jī)架進(jìn)行多目標(biāo)優(yōu)化球碉,優(yōu)化后的模型相比拓?fù)鋬?yōu)化的模型,其靜動(dòng)態(tài)特性均有一定的提高仓蛆。研究表明汁尺,拓?fù)鋬?yōu)化和多目標(biāo)優(yōu)化可以相結(jié)合運(yùn)用到類似的機(jī)架結(jié)構(gòu)優(yōu)化中,且具有一定的工程應(yīng)用價(jià)值多律。
關(guān)鍵詞:結(jié)構(gòu)優(yōu)化;ANSYS Workbench搂蜓;拓?fù)鋬?yōu)化狼荞;多目標(biāo)優(yōu)化
0 引言
近年來,隨著飲料帮碰、食品相味、醫(yī)療行業(yè)的不斷發(fā)展,對(duì)具有諸多優(yōu)良性能的PET瓶的需求也逐年遞增殉挽,這就要求生產(chǎn)PET瓶的吹瓶機(jī)的效率能夠得到提高[1]丰涉。目前市場(chǎng)上常見的吹瓶機(jī)多采用 兩步法生產(chǎn)工藝(瓶坯的制備和拉伸吹塑成型分別由兩臺(tái)設(shè)備完成),主要有直線式吹瓶機(jī)和旋轉(zhuǎn)式吹瓶機(jī)[2]斯碌。旋轉(zhuǎn)式吹瓶機(jī)相對(duì)于直線式吹瓶機(jī)具有模腔數(shù)量多一死、模具更換快捷、產(chǎn)量高傻唾、穩(wěn)定性強(qiáng)等優(yōu)點(diǎn)投慈,成為大多數(shù)食品承耿、飲料企業(yè)選擇的對(duì)象。由于國(guó)內(nèi)PET瓶成型設(shè)備起步比較晚伪煤,雖然近幾年發(fā)展迅速加袋,但相比國(guó)外那些具有悠久歷史的PET瓶成型設(shè)備研發(fā)公司,設(shè)備的技術(shù)水平和各項(xiàng)性能上還有一定差距[3]抱既。
機(jī)架作為旋轉(zhuǎn)式吹瓶機(jī)最重要的部件之一职烧,支撐著整個(gè)旋轉(zhuǎn)拉伸吹塑部件的重量,其結(jié)構(gòu)的剛度防泵、強(qiáng)度蚀之、穩(wěn)定性對(duì)整臺(tái)設(shè)備的運(yùn)作起到至關(guān)重要的作用。因此择克,如何提高機(jī)架的靜動(dòng)態(tài)性能成為了設(shè)計(jì)高速旋轉(zhuǎn)式吹瓶機(jī)的關(guān)鍵問題之一恬总。近年來隨著計(jì)算機(jī)技術(shù)的快速發(fā)展,結(jié)構(gòu)優(yōu)化方法與計(jì)算機(jī)技術(shù)逐步實(shí)現(xiàn)了完美融合肚邢,許多大型通用CAE分析軟件里出現(xiàn)了結(jié)構(gòu)優(yōu)化模塊壹堰,這使結(jié)構(gòu)優(yōu)化分析的效率和準(zhǔn)確率得到了很大的提高[4]。本文研究的旋轉(zhuǎn)式吹瓶機(jī)的機(jī)架由四個(gè)部分焊接而成骡湖,分別為上面板贱纠、中間面板層、下面板和地腳响蕴,其中中間面板層是由許多整塊鋼板直接焊接而成谆焊,這增加了機(jī)架自身的質(zhì)量,提高了企業(yè)的制造成本浦夷。為了達(dá)到降低機(jī)架的質(zhì)量的同時(shí)改善其靜動(dòng)態(tài)性能的目的辖试,本文先基于ANSYS Workbench平臺(tái)的拓?fù)鋬?yōu)化模塊對(duì)機(jī)架進(jìn)行減重,然后基于ANSYS Workbench平臺(tái)的響應(yīng)面優(yōu)化模塊對(duì)機(jī)架進(jìn)行多目標(biāo)優(yōu)化以保證機(jī)架在質(zhì)量減少的情況下劈狐,其靜動(dòng)態(tài)性能有所改善罐孝。
1 機(jī)架初始靜動(dòng)態(tài)特性分析
1.1 機(jī)架有限元模型的建立
機(jī)架的幾何尺寸為:4150mm×3750mm×547mm,上下面板的材料為低合金高強(qiáng)度鋼肥缔,屈服極限為400 MPa 左右莲兢,中間面板層和地腳的材料為普通碳素結(jié)構(gòu)鋼,屈服極限為220 MPa 左右续膳。根據(jù)圣維南原理對(duì)機(jī)架三維模型進(jìn)行合理地簡(jiǎn)化[5]改艇。通過SolidWorks與ANSYS Workbench 的無縫連接,將機(jī)架三維模型導(dǎo)入到Workbench中坟岔,對(duì)其進(jìn)行網(wǎng)格劃分谒兄,本文采用四面體網(wǎng)格對(duì)機(jī)架進(jìn)行劃分,上下面板和中間面板層的單元尺寸設(shè)置為40 mm炮车,地腳的單元尺寸設(shè)置為25 mm舵变,同時(shí) Transition設(shè)置為Slow酣溃,Span Angle Center 設(shè)置為Fine,網(wǎng)格劃分結(jié)果如圖1所示纪隙,共產(chǎn)生了251788個(gè)單元赊豌,471177個(gè)節(jié)點(diǎn)。
圖 1 機(jī)架有限元模型
1.2 機(jī)架的靜力分析
1.2.1 接觸和約束設(shè)置
因?yàn)闄C(jī)架是由多塊大小不同的鋼板焊接而成绵咱,所以可以將其視為焊接結(jié)構(gòu)件碘饼,無需設(shè)置接觸,只需要將機(jī)架三維模型導(dǎo)入到Workbench中后悲伶,進(jìn)入DesignModeler環(huán)境艾恼,然后選中所有零件右擊 From New Part,這樣可以將所有零件歸為一個(gè)部件麸锉,公共界面共享網(wǎng)格钠绍,節(jié)點(diǎn)耦合。機(jī)架的約束設(shè)置為四個(gè)地腳的底面為固定約束花沉。
1.2.2 載荷設(shè)置
機(jī)架所受的載荷主要有9個(gè)部分柳爽,分別是回轉(zhuǎn)運(yùn)動(dòng)件的重量、開合模導(dǎo)軌的重量碱屁、開閉鎖導(dǎo)軌的重量磷脯、取送坯星輪的重量、取送瓶星輪的重量娩脾、減速電機(jī)的重量赵誓、過渡帶輪組1的重量、過渡帶輪組2的重量和過渡帶輪組3的重量柿赊,其中回轉(zhuǎn)運(yùn)動(dòng)件需設(shè)置1.25倍安全系數(shù)俩功,具體的載荷參數(shù)如表1所示,載荷分布如圖2所示碰声。
圖 2 載荷分布
1.2.3 靜力分析結(jié)果
計(jì)算得到機(jī)架的總變形和等效應(yīng)力云圖绑雄,如圖3、圖4所示奥邮。機(jī)架的最大變形量為0.111 mm, 出現(xiàn)在機(jī)架上面板的中下部罗珍,與載荷分布情況相同洽腺。機(jī)架的最大應(yīng)力為82.358 MPa,出現(xiàn)在一個(gè)地腳與下面板接觸面的尖角處覆旱。由彈性力學(xué)的知識(shí)可知蘸朋,尖角處的應(yīng)力是無窮大的,在CAE 軟件中的表現(xiàn)就是尖角處的應(yīng)力值是不收斂的扣唱,會(huì)隨著網(wǎng)格的細(xì)化藕坯,應(yīng)力值不斷增大团南,所以該值是不可取的,不能作為機(jī)架最大應(yīng)力的準(zhǔn)確值[6]炼彪。觀察機(jī)架的等效應(yīng)力云圖可知吐根,藍(lán)色和淺藍(lán)色區(qū)域幾乎覆蓋了整個(gè)機(jī)架,即機(jī)架的應(yīng)力值普遍小于36.604MPa辐马,這遠(yuǎn)遠(yuǎn)小于所用材料的屈服極限拷橘。通過對(duì)機(jī)架的靜力分析可知,原來對(duì)于機(jī)架的設(shè)計(jì)過于保守喜爷,造成了材料的浪費(fèi)冗疮,所以機(jī)架結(jié)構(gòu)需 要進(jìn)一步的優(yōu)化以降低機(jī)架的質(zhì)量。
圖 3 機(jī)架總變形云圖
圖 4 機(jī)架等效應(yīng)力云圖
1.3 機(jī)架的模態(tài)分析
模態(tài)分析是動(dòng)力學(xué)分析的基礎(chǔ)檩帐,其主要工作就是求解結(jié)構(gòu)的固有特性术幔,包括固有頻率、振型等湃密。因?yàn)楣逃刑匦詢H與結(jié)構(gòu)自身有關(guān)诅挑,所以在求解時(shí)不需要考慮結(jié)構(gòu)所受的外部載荷,因此僅對(duì)機(jī)架四個(gè)地腳的底面進(jìn)行固定約束勾缭。通過軟件計(jì)算揍障,得到了機(jī)架前六階模態(tài)的固有頻率,如表2所示俩由。實(shí)際工程中對(duì)結(jié)構(gòu)產(chǎn)生影響的通常是結(jié)構(gòu)的低階模態(tài)毒嫡,因?yàn)楦唠A模態(tài)往往不容易被激發(fā),所以按照上述方法提取機(jī)架的前三階模態(tài)[7-8]幻梯。第一階模態(tài)的固有頻率為76.673 Hz兜畸,其振型為機(jī)架沿y 軸方向的振動(dòng),如圖5所示碘梢;第二階模態(tài)的固有頻率為94.906 Hz咬摇,其振型為機(jī)架繞z軸的1階彎曲振動(dòng),如圖6所示煞躬。第三階模態(tài)的固有頻率為101.680 Hz肛鹏,其振型為機(jī)架繞x軸的一階彎曲振動(dòng),如圖7所示恩沛。因?yàn)楸疚乃芯康哪承吞?hào)旋轉(zhuǎn)式吹瓶機(jī)的轉(zhuǎn)速為45 r.p.m在扰,模腔數(shù)為20,所以該吹瓶機(jī)的工作頻率在15Hz左右雷客,遠(yuǎn)遠(yuǎn)低于機(jī)架的前三階模態(tài)的固有頻率芒珠,所以有充足的結(jié)構(gòu)優(yōu)化空間。
圖 5 第一階振型
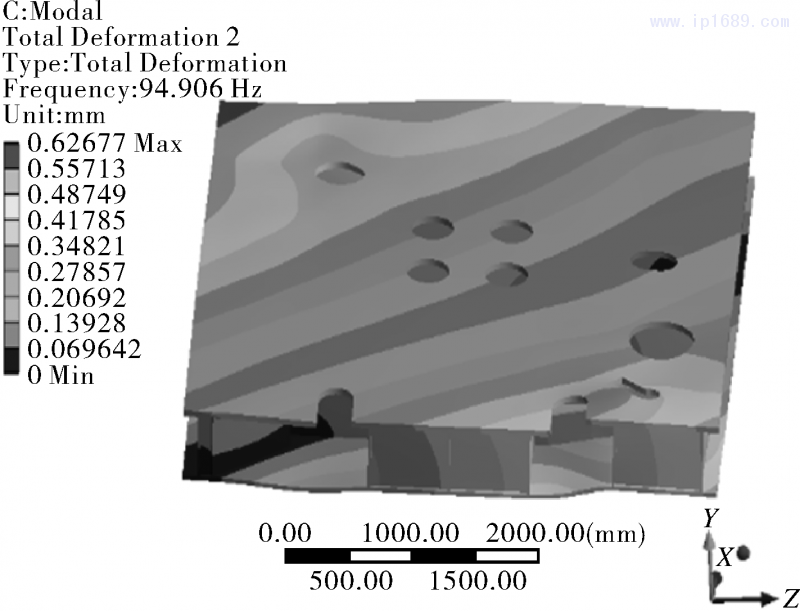
圖 6 第二階振型
圖 7 第三階振型
2 機(jī)架的拓?fù)鋬?yōu)化
2.1 基于ANSYS Workbench的機(jī)架拓?fù)鋬?yōu)化
拓?fù)鋬?yōu)化屬于結(jié)構(gòu)優(yōu)化的一種搅裙,是對(duì)結(jié)構(gòu)內(nèi)部布局形式進(jìn)行優(yōu)化皱卓,所以又稱布局優(yōu)化裹芝。主要應(yīng)用于產(chǎn)品的概念設(shè)計(jì)階段,尤其是對(duì)那些沒有最優(yōu)結(jié)構(gòu)參考的產(chǎn)品娜汁,采用拓?fù)鋬?yōu)化可以大致確定結(jié)構(gòu)的最佳形狀[9]嫂易。與有限元法相結(jié)合的結(jié)構(gòu)拓?fù)鋬?yōu)化本質(zhì)上是一個(gè)單元有無的問題,通過拓?fù)鋬?yōu)化的迭代計(jì)算存炮,保留對(duì)結(jié)構(gòu)傳力性能較好的單元炬搭,去除對(duì)結(jié)構(gòu)傳力性能作用不大的單元,最后得到一個(gè)滿足要求的最優(yōu)結(jié)構(gòu)[10]穆桂。本文所研究的機(jī)架拓?fù)鋬?yōu)化是建立在靜力分析基礎(chǔ)之上的宫盔,以單元材料密度為設(shè)計(jì)變量,結(jié)構(gòu)的柔順度最邢硗辍(結(jié)構(gòu)靜剛度最大)為目標(biāo)灼芭,體積減少百分比為約束,對(duì)機(jī)架的中間面板層進(jìn)行靜力學(xué)拓?fù)鋬?yōu)化般又。通過12次迭代計(jì)算可得機(jī)架中間面板層的單元偽密度云圖彼绷,如圖8所示,其中紅色區(qū)域表示可以刪除的區(qū)域茴迁,灰色區(qū)域表示保留的區(qū)域寄悯。
圖 8 中間面板層的單元偽密度云圖
2.2 拓?fù)鋬?yōu)化結(jié)果分析
基于單元偽密度云圖對(duì)機(jī)架的中間面板層進(jìn)行重新建模,將拓?fù)鋬?yōu)化后的機(jī)架三維模型再次導(dǎo)入ANSYS Workbench中進(jìn)行靜力分析和模態(tài)分析堕义,網(wǎng)格猜旬、約束等設(shè)置與之前保持一致。拓?fù)鋬?yōu)化后的機(jī)架與初始機(jī)架相比倦卖,靜應(yīng)力最大變形量增加 2.7%洒擦;質(zhì)量下降了944 kg,降幅 8.1%怕膛;1階模態(tài)固有頻率增長(zhǎng)了1.9%熟嫩;2階模態(tài)固有頻率下降了8.1%;3 階模態(tài)固有頻率下降了2.7%褐捻。雖然拓?fù)鋬?yōu)化后的機(jī)架的靜應(yīng)力最大變形量和2掸茅、3 階模態(tài)固有頻率沒有得到改善,但是兩者仍處于安全范圍內(nèi)柠逞,所以對(duì)機(jī)架的拓?fù)鋬?yōu)化是有效的倦蚪。
3 機(jī)架的多目標(biāo)優(yōu)化
3.1 響應(yīng)面法簡(jiǎn)介
響應(yīng)面法是采用試驗(yàn)設(shè)計(jì)理論對(duì)指定的設(shè)計(jì)點(diǎn)集合進(jìn)行試驗(yàn),計(jì)算得出所有設(shè)計(jì)點(diǎn)的數(shù)據(jù)后边苹,采用多元二次方程擬合目標(biāo)函數(shù)和約束函數(shù)的關(guān)系,用來預(yù)測(cè)非試驗(yàn)點(diǎn)的響應(yīng)值的方法[11]裁僧。對(duì)于n個(gè)變量的情況个束,二次多項(xiàng)式響應(yīng)面模型為:
式中慕购,X=(x1,x2茬底,…沪悲, xn),xi(i=1阱表,2殿如,…,n)為 設(shè)計(jì)變量最爬,β0涉馁、βi、βii爱致、βij 為未知變量烤送,個(gè)數(shù) L=(n+1)(n+2)/2,故未知系數(shù)β=(β1糠悯,β2帮坚,…,βn)T互艾,通過最小二乘法確定時(shí)试和,試驗(yàn)點(diǎn)的個(gè)數(shù)P必須大于L。
3.2 基于 ANSYS Workbench 的多目標(biāo)優(yōu)化
機(jī)架的中間面板層是由不同長(zhǎng)度的鋼板焊接而成纫普,通過觀察拓?fù)鋬?yōu)化后機(jī)架中間面板層的前三階模態(tài)和總變形云圖阅悍,選取對(duì)機(jī)架靜動(dòng)態(tài)特性影響較大的6個(gè)尺寸參數(shù)作為多目標(biāo)優(yōu)化的設(shè)計(jì)變量,如圖9所示局嘁,并給它們確定取值范圍溉箕,如表3所示。
圖 9 設(shè)計(jì)變量的選取
本文試驗(yàn)點(diǎn)的選擇采用中心復(fù)合試驗(yàn)設(shè)計(jì)方法(Central Composite Design)悦昵。運(yùn)用該方法可以給響應(yīng)面模型挑選合適的數(shù)據(jù)樣本點(diǎn)肴茄,且具有預(yù)測(cè)性好、設(shè)計(jì)簡(jiǎn)單但指、試驗(yàn)次數(shù)少等優(yōu)點(diǎn)[12]寡痰。因?yàn)橥負(fù)鋬?yōu)化后的機(jī)架的質(zhì)量已得到了大幅度下降,所以不作為本次優(yōu)化的目標(biāo)棋凳,本次優(yōu)化選取靜應(yīng)力最大變形量拦坠,第一階固有頻率,第二階固有頻率剩岳,第三階固有頻率作為優(yōu)化目標(biāo)贞滨,具體的數(shù)學(xué)模型如下:
min(d) (2)
max(fi),i=1,2晓铆,3 (3)
s.t. fi ≥fiL勺良,i=1,2骄噪,3
tiL ≤ ti ≤ tiU尚困,i=7,8链蕊,9事甜,14,18滔韵,45
式中 d——機(jī)座的靜應(yīng)力最大變形量逻谦;
fi——機(jī)座的第 i 階固有頻率;
fiL——機(jī)座第 i 階固有頻率的下限約束值奏属, 其中第一跨跨、二、三階固有頻率的下限 約束值分別為 79囱皿、88勇婴、100 Hz;
ti——第 i 個(gè)設(shè)計(jì)變量嘱腥;
tiL——第 i 個(gè)設(shè)計(jì)變量下限約束值耕渴; tiU——第 i 個(gè)設(shè)計(jì)變量上限約束值。
因?yàn)橥瑫r(shí)具有4個(gè)優(yōu)化目標(biāo)齿兔,所以采用 MOGA 算法進(jìn)行多目標(biāo)優(yōu)化橱脸。MOGA算法作為一種多目標(biāo)遺傳算法,通常用于求解兩個(gè)或兩個(gè)以上的目標(biāo)同時(shí)需要優(yōu)化的問題分苇,通過計(jì)算求解可以求得多目標(biāo)之間的妥協(xié)解[12]添诉。通過 10 次迭代計(jì)算得到 3 組候選的最佳設(shè)計(jì)點(diǎn)。
通過對(duì)比分析医寿,選擇第2組候選點(diǎn)作為最終選擇的最佳設(shè)計(jì)點(diǎn)栏赴,并對(duì)該組候選點(diǎn)的設(shè)計(jì)變量的值進(jìn)行圓整,圓整好后的 7靖秩、8须眷、9、14沟突、18 和 45 號(hào)板的板厚為 22花颗、18、12惠拭、12扩劝、25 和 12 mm。
3.3 多目標(biāo)優(yōu)化結(jié)果分析
基于響應(yīng)面的多目標(biāo)優(yōu)化后的結(jié)果,對(duì)機(jī)架的三維模型進(jìn)行改進(jìn)棒呛,將更改好的模型導(dǎo)入ANSYS Workbench中進(jìn)行靜力分析和模態(tài)分析葡公。此時(shí)機(jī)架的質(zhì)量為10722kg,靜應(yīng)力最大變形量為0.112 mm条霜,前三階固有頻率分別為79.160 Hz、88.264 Hz涵亏、100.820 Hz宰睡,相比拓?fù)鋬?yōu)化后的機(jī)架模型,靜應(yīng)力最大變形量下降了1.8%气筋,第1階固有頻率提高了1.3%拆内、第2階固有頻率提高了1.2%,第3 階固有頻率提高了1.9%宠默。
4 結(jié)語
(1)建立了某旋轉(zhuǎn)式吹瓶機(jī)機(jī)架的參數(shù)化模型麸恍,并對(duì)其初始靜動(dòng)態(tài)特性進(jìn)行有限元分析,為之后的機(jī)架結(jié)構(gòu)優(yōu)化提供參考搀矫。
(2)采用多級(jí)優(yōu)化(拓?fù)鋬?yōu)化與多目標(biāo)優(yōu)化)的方法對(duì)機(jī)架進(jìn)行結(jié)構(gòu)優(yōu)化抹沪。優(yōu)化后的機(jī)架相比初始的機(jī)架,質(zhì)量和第1階固有頻率得到了較大的改善瓤球,其中質(zhì)量減少939kg融欧,降幅8.1%,第1階固有頻率提高2.487 Hz卦羡,增幅3.2%噪馏,實(shí)現(xiàn)了降低機(jī)架質(zhì)量的同時(shí)改善機(jī)架靜動(dòng)態(tài)特性的目標(biāo)。
參考文獻(xiàn):
[1] 孫臏 .PET 吹瓶技術(shù)的創(chuàng)新[J]. 塑料包裝绿饵,2009欠肾,19(1):18-29.
[2] 宋奎偉 . 旋轉(zhuǎn)式和直線式吹瓶機(jī)的綜合比較[C].中國(guó)自動(dòng)化學(xué)會(huì)中南六省(區(qū))2010 年第 28 屆年會(huì)·論文集 .2010.
[3] 于輝拟赊,尹鳳福刺桃,閆磊,等 . 塑料近紅外分選設(shè)備噴吹分離的仿真研究[J]. 機(jī)電工程要门,2019虏肾,36(4):378-
382.
[4] 林翠藍(lán) . 淺談結(jié)構(gòu)優(yōu)化新方法及其計(jì)算機(jī)實(shí)現(xiàn)[J].通訊世界,2017欢搜,17(6):60-61.
[5] 崔巍封豪,張煜杭,宋日懸炒瘟,等 . 一種井筒內(nèi)低品位余熱回收的串級(jí)式翅片重力熱管裝置的設(shè)計(jì)[J]. 壓力 容器吹埠,2019,36(1):35-40.
[6] 閆雪,韓錫龍 . 旋風(fēng)分離器料腿-翼閥系統(tǒng)排料特性的試驗(yàn)分析[J]. 流體機(jī)械缘琅,2019粘都,47(4):14-18.
[7] 蘇金英,周炬 . 某特裝車汽車座椅的模態(tài)分析[J].裝備制造技術(shù)刷袍,2011翩隧,18(10):60-61.
[8] 袁志林,高翠芝呻纹,江海蛟堆生,等 . 基于ABAQUS 的PET切片包裝機(jī)鋼結(jié)構(gòu)有限元分析[J]. 包裝與食品機(jī)械,2018雷酪,36(6):45-49.
[9] Gunwant D淑仆,Misra A.Topology optimization of continuum structures using optimality criterion approach in ANSYS.International Journal of Advances in Engineering & Technology,2012哥力,5(1):470-485.
[10] 李帥蔗怠,穆瑞芳,張壯志 . 基于 ANSYS Workbench 拓?fù)鋬?yōu)化對(duì)止動(dòng)架輕量化的研究[J]. 船舶工程吩跋, 2016寞射,38(7):35-39.
[11] 趙海鳴,蔣彬彬钞澳,李密 . 基于拓?fù)鋬?yōu)化與多目標(biāo)優(yōu)化的機(jī)床底座結(jié)構(gòu)設(shè)計(jì)[J]. 機(jī)械設(shè)計(jì)與研究怠惶,2018, 34(4):100-105.
[12] 李源轧粟,黃華策治,郭潤(rùn)蘭 . 基于響應(yīng)面法的加工中心立柱結(jié)構(gòu)多級(jí)多目標(biāo)參數(shù)優(yōu)化設(shè)計(jì)[J]. 機(jī)械設(shè)計(jì), 2019兰吟,36(11):44-49.



 2025年4月3日 星期四
2025年4月3日 星期四



















 聚砜醫(yī)療干粉吸入...
聚砜醫(yī)療干粉吸入... 塑料包裝材料的減...
塑料包裝材料的減... 汽車功能鍵觸摸蓋I...
汽車功能鍵觸摸蓋I... 高性能注塑聚丙烯...
高性能注塑聚丙烯...













