引言
注塑機(jī)具有能一次成型外型復(fù)雜、尺寸精確或帶有金屬嵌件的質(zhì)地密致的塑料制品醒颖,被廣泛應(yīng)用于國防妻怎、機(jī)電、汽車泞歉、交通逼侦、建材、包裝腰耙、農(nóng)業(yè)及日常生活各個領(lǐng)域榛丢。注射機(jī)二板合模裝置作為20世紀(jì)90年代歐洲推出的革新性結(jié)構(gòu),相比曲肘式鎖模結(jié)構(gòu)挺庞,具有容量大晰赞、受力理想、結(jié)構(gòu)剛性好、占空間小等特點(diǎn)掖鱼,使其在大型然走、超大型領(lǐng)域具有得天獨(dú)厚的優(yōu)勢。
在國內(nèi)戏挡,大型二板注塑機(jī)技術(shù)較為落后芍瑞,設(shè)備市場競爭力稍顯薄弱,主要體現(xiàn)在合模系統(tǒng)工作的適應(yīng)性和穩(wěn)定性增拥,設(shè)備運(yùn)行的節(jié)能環(huán)保以及液壓控制系統(tǒng)的高效調(diào)控等方面啄巧。國內(nèi)規(guī)模以上注射機(jī)生產(chǎn)廠商主要集中在浙江,如寧波海天掌栅、寧波海達(dá)秩仆、泰瑞機(jī)器(杭州)等。近幾年猾封,相關(guān)注塑機(jī)廠商與研究機(jī)構(gòu)合作澄耍,圍繞二板注射機(jī)合模機(jī)構(gòu),在優(yōu)化設(shè)計[1-4]晌缘、抱閘設(shè)計[5]齐莲、性能評價[6-8]、液壓控制[9-10]等方面進(jìn)行了大量研究磷箕,取得了很多成果选酗。
由于合模機(jī)構(gòu)涉及裝配零件較多,影響復(fù)雜岳枷,工作時的實際受力狀態(tài)難以簡單計算芒填,導(dǎo)致合模機(jī)構(gòu)鎖模壽命無法準(zhǔn)確預(yù)測,進(jìn)而嚴(yán)重影響了合模機(jī)構(gòu)可靠性評價和判斷空繁。本文正是針對以上技術(shù)難題殿衰,借助有限元數(shù)值計算方法,對合模機(jī)構(gòu)進(jìn)行多體力學(xué)有限元建模和分析盛泡,明確其鎖模時各部件的應(yīng)力和變形情況闷祥,為下一步研究打下基礎(chǔ)。
?
1.二板式注射機(jī)合模機(jī)構(gòu)
二板合模機(jī)構(gòu)有幾種形式傲诵,原理基本一致凯砍。圖1所示為一典型二板復(fù)合式合模機(jī)構(gòu),主要由定模板掰吕、動模板果覆、鎖模油缸、拉桿殖熟、抱閘局待、閘板驅(qū)動油缸、移模油缸組成。合模動作過程:首先移模油缸驅(qū)動動模板沿拉桿移動钳榨,直至模具閉合舰罚;閘板驅(qū)動油缸驅(qū)動抱閘兩半閘板閉合,抱緊拉桿末端螺紋薛耻;鎖模油缸驅(qū)動拉桿相對于定模板運(yùn)動营罢,鎖緊模具。
泰瑞機(jī)器股份有限公司研究開發(fā)了大型二板注射機(jī)產(chǎn)品饼齿,如圖2所示饲漾。采用擠注式注塑系統(tǒng)、二板直壓式合模系統(tǒng)缕溉、節(jié)能的伺服電機(jī)定量泵液壓系統(tǒng)技術(shù)考传。但是,考慮到水平裝模和加工裝配工藝性证鸥,動模板孔與拉桿間隙配合僚楞,無滑動支撐作用。動模板后方的抱閘兩半合閉時枉层,抱緊拉桿泉褐。
?
2.有限元模型
2.1幾何模型
本文以泰瑞1700噸二板注射機(jī)合模機(jī)構(gòu)為例進(jìn)行分析。其關(guān)鍵外形尺寸見表1鸟蜡。
由于大型二板式合模機(jī)構(gòu)整體結(jié)構(gòu)非常復(fù)雜,為了使分析更加簡潔又不失真,現(xiàn)對關(guān)鍵零部件作必要假設(shè)和簡化膜赃。去除零件中圓角、螺紋揉忘、臺階财剖、螺紋孔等細(xì)節(jié),去除了調(diào)模裝置和頂出機(jī)構(gòu)癌淮。根據(jù)表1中基本尺寸,利用Solidworks三維軟件對定模板沦补、動模板乳蓄、拉桿等進(jìn)行三維建模,并進(jìn)行裝配夕膀,兩模板間距取1000mm虚倒,如圖3所示。將零部件保存為.igs格式文件产舞,導(dǎo)入ABAQUS有限元軟件魂奥,作為數(shù)值模擬的幾何模型。
?
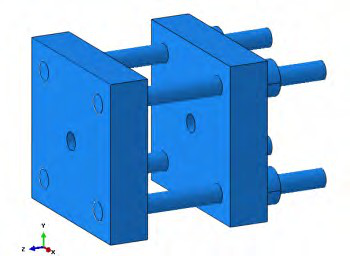
圖3.簡化幾何模型
?
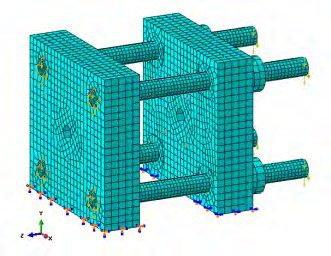
圖4有限元模型
?
2.2材料參數(shù)及網(wǎng)格劃分
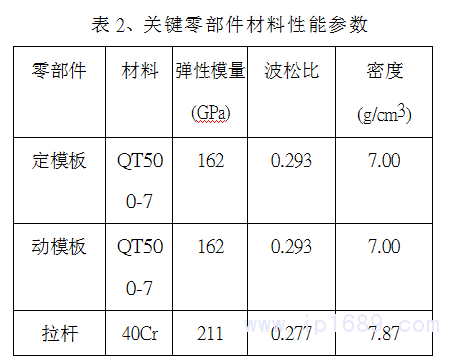
若進(jìn)行受力分析易猫,需給定零件模型相應(yīng)的物理力學(xué)參數(shù)耻煤。由于此處模板、拉桿在受力狀態(tài)下只產(chǎn)生彈性變形,所以不需要塑性應(yīng)力應(yīng)變數(shù)據(jù)哈蝇。此外棺妓,拉桿可能會由于懸臂狀態(tài)產(chǎn)生自重下垂變形,故這里將給定密度值炮赦。幾種零件的性能參數(shù)如表2所示怜跑。
?
?
合模機(jī)構(gòu)三維幾何建模較為復(fù)雜,在Abaqus中選取C3D8R減縮實體單元為劃分網(wǎng)格的單元類型,可提高計算速度吠勘。綜合考慮到模型三維尺寸大小和模擬計算精度性芬,模板選擇網(wǎng)格大小為100mm,拉桿網(wǎng)格大小為50mm剧防。有限元模型網(wǎng)格劃分情況如圖4所示植锉。
?
2.3邊界條件和載荷
設(shè)置定義各零件之間的接觸條件。拉桿通過銅質(zhì)精密滑動軸承安裝于定模板孔中诵姜,兩者之間摩擦較小汽煮,忽略其大小,摩擦系數(shù)取為0棚唆。抱閘安裝于動模板背面暇赤,將抱閘裝置與動模板簡化為同一結(jié)構(gòu)體,拉桿與抱閘接觸處施加“綁定”(Tie)約束條件宵凌,使其具有相同的軸向行為鞋囊。
考慮到二板合模機(jī)構(gòu)受力復(fù)雜,這里突出關(guān)鍵因素瞎惫,忽略次要因素(如模板的溫度)溜腐,對模型施加必要的邊界約束和載荷,如圖4所示,具體如下:
(a)定模板固定在床身上瓜喇,底部固定處可作為完全約束處理挺益;
(b)動模板在軸向可沿導(dǎo)軌上滑動,在豎直方向存在位移約束乘寒;
(c)為了模擬鎖模油缸工作時的情況望众,在拉桿靠近前模板的端面上施加軸向位移約束;
(d)假設(shè)模具和模板安裝面積為1000mm*1000mm伞辛,鎖模力為17000KN烂翰,在定模板和動模板安裝面積上分別加載均布載荷17MPa的壓強(qiáng);
(e)對四根拉桿施加重力載荷蚤氏,在y方向上添加重力加速度-9800mm/S2甘耿。
最后,建立Step-1分析步竿滨,進(jìn)行有限元模擬計算佳恬。
?
3.模擬結(jié)果與分析
3.1.變形分析
在考慮拉桿重力的情況下捏境,二板合模機(jī)構(gòu)的變形分布圖如圖5所示。由圖可見殿怜,合模機(jī)構(gòu)的最大變形量為0.994mm典蝌,發(fā)生在定模板的頂部內(nèi)側(cè)。這是因為定模板底部完全定位受限头谜,動模板和連桿是固聯(lián)的骏掀,在定動模板受到模具處的壓力時,定模板變形特別是上部變形最大柱告。
?
?
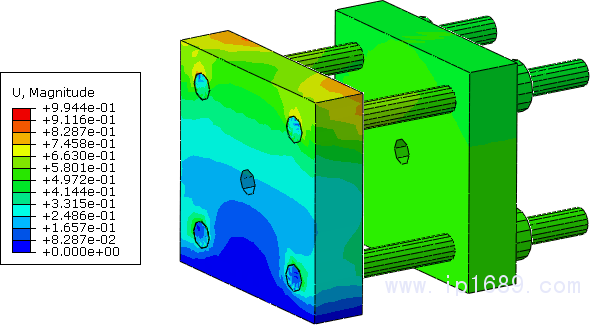
圖5.合模機(jī)構(gòu)變形分布圖
?
此外截驮,定模板上與拉桿的配合連接處,相比于周圍际度,孔邊出現(xiàn)了較大的變形量葵袭。上面兩孔最大變形在0.8mm,下面兩孔最大變形在0.5mm乖菱,這是因為拉桿與孔有相互力的作用坡锡。動模板的變形情況比較均勻。
?
3.2.應(yīng)力分析
圖6為合模機(jī)構(gòu)的應(yīng)力分布圖窒所。最大應(yīng)力為211MPa鹉勒,發(fā)生在拉桿上,集中于拉桿與前模板的連接處吵取。根據(jù)拉桿材料強(qiáng)度禽额,該應(yīng)力值不足以使拉桿發(fā)生塑性變形和破壞,所以合模機(jī)構(gòu)是安全的皮官。但是脯倒,當(dāng)合模機(jī)構(gòu)在頻繁的進(jìn)行合模鎖模注塑動作時,拉桿將成為最有可能發(fā)生疲勞破壞的部件捺氢。
?
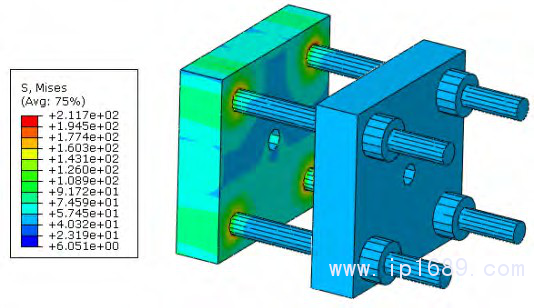
圖6.合模機(jī)構(gòu)應(yīng)力云圖
?
根據(jù)以上合模機(jī)構(gòu)變形和應(yīng)力分析藻丢,前模板在前端面設(shè)計連接時可以適當(dāng)加強(qiáng)。另外摄乒,可考慮改善拉桿與前模板的連接配合方案郁岩,以減小應(yīng)力集中。
?
4.結(jié)語
對合模機(jī)構(gòu)的零部件進(jìn)行適當(dāng)簡化缺狠,根據(jù)其工作原理,建立了有限元模型萍摊;通過有限元模擬分析發(fā)現(xiàn)挤茄,最大變形發(fā)生在定模板頂部,集中應(yīng)力發(fā)生在拉桿與定模板孔連接處冰木;該模擬分析結(jié)果穷劈,為進(jìn)一步優(yōu)化設(shè)計提供依據(jù)笼恰,也為合模機(jī)構(gòu)的壽命預(yù)測的打下基礎(chǔ)。
?



























 聚砜醫(yī)療干粉吸入...
聚砜醫(yī)療干粉吸入... 塑料包裝材料的減...
塑料包裝材料的減... 汽車功能鍵觸摸蓋I...
汽車功能鍵觸摸蓋I... 高性能注塑聚丙烯...
高性能注塑聚丙烯...





